CaSSIS schickt erste hoch aufgelöste Bilder vom Mars
Die Marskamera CaSSIS auf der ExoMars-Sonde Trace Gas Orbiter hat ab dem 22. November die ersten hoch aufgelösten Bilder des Roten Planeten aufgenommen. Die Berner Kamera arbeitete fast perfekt und hat einen spektakulären Blick auf die Oberfläche geliefert. CaSSIS (Colour and Stereo Surface Imaging System) wurde von einem Team der Universität Bern unter der Leitung von Prof. Nicolas Thomas vom Center for Space and Habitability (CSH) entwickelt. Die Kamera startete am 14. März 2016 mit der ExoMars-Sonde Trace Gas Orbiter (TGO) der Europäischen Raumfahrt Agentur ESA ihre Reise zum Mars. Ihr Ziel erreichte die Sonde am 19. Oktober und trat in die Marsumlaufbahn ein. CaSSIS hat nun ihre ersten Bilder aus dem Orbit gesendet. «Die ersten Bilder, die wir erhielten, sind absolut spektakulär – und es sollte nur ein Test sein», sagt Nicolas Thomas.
Das Video gibt einige der besten Aufnahmen wieder, darunter den spekaktulären Überflug von Hebes Chasma. Es illustriert auch, wie CaSSIS Daten sammelt, indem die Kamera Farbbilder in Stereo aufnimmt. Die Aufnahmen von Hebes Chasma wurden während der grössten Annäherung gemacht und weisen die höchste Auflösung auf (2.8m/Pixel). © ESA/Roscosmos/ExoMars/CaSSIS/UniBE.
Erfolgreiche Tests von Kamera und Raumsonde
Die Sonde befindet sich derzeit in einer sehr elliptischen Umlaufbahn von etwas mehr als 4 Tagen Dauer um den Mars. Sie kommt kurzzeitig bis auf 250 km an die Planetenoberfläche heran und entfernt sich dann wieder bis auf über 100’000 km. Zwei dieser nahen Vorbeiflüge wurden ausgewählt, um CaSSIS und die drei anderen Instrumente an Bord des TGO zu prüfen. Die erste Annäherung fand am 22. November statt.
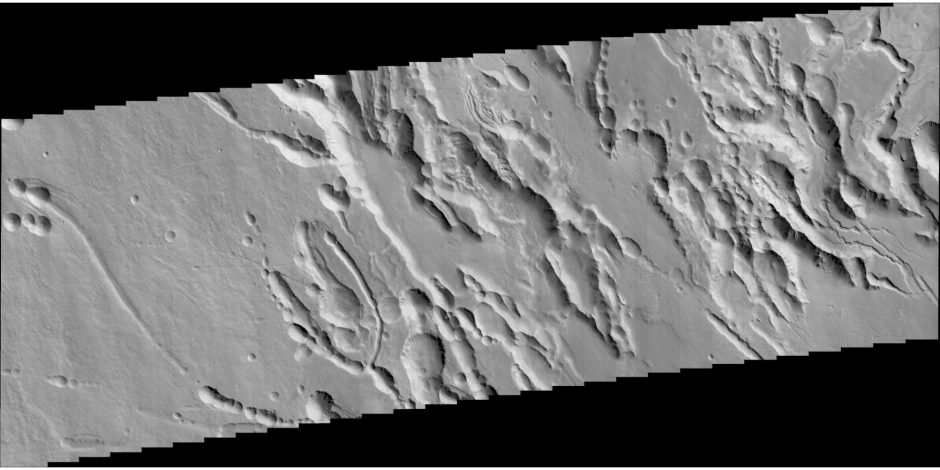
«Das geglückte Abbremsen des TGO in der Marsumlaufbahn hat wenig Beachtung gefunden, da die Bruchlandung des Landers Schiaparelli die öffentliche Aufmerksamkeit auf sich gezogen hat. Wir hatten aber alle Hände voll zu tun, unser wissenschaftliches Programm zu starten», sagt Nicolas Thomas. Das Berner Team war in den letzten Wochen intensiv damit beschäftigt, die Beobachtungssequenzen für die beiden nahen Vorbeiflüge zu planen. Insgesamt elf Bilder wurden während des ersten Vorbeiflugs zurückgeschickt. Die Raumsonde überflog an ihrem nächsten Punkt zum Mars eine Region namens Hebes Chasma.
«Wir haben Hebes Chasma mit 2,8 Metern pro Pixel gesehen», sagt Thomas. «Das ist, als ob wir mit 15’000 Stundenkilometern über Bern hinweg rasen und gleichzeitig scharfe Bilder von Autos in Zürich schiessen würden.»
Zusätzliche Daten wurden erhoben, um die Qualität der Bilder bei der Nachbearbeitung zu verbessern. Die daraus resultierende Bildqualität beeindruckte das gesamte Team: «Wir waren ziemlich nervös, aber es sieht so aus, als ob fast alles so funktioniert, wie wir es geplant haben. Die so entstandenen Bilder sind wirklich scharf», freut sich Antoine Pommerol, CaSSIS Co-Investigator vom Center of Space and Habitability (CSH) an der Universität Bern.
Erst der Anfang
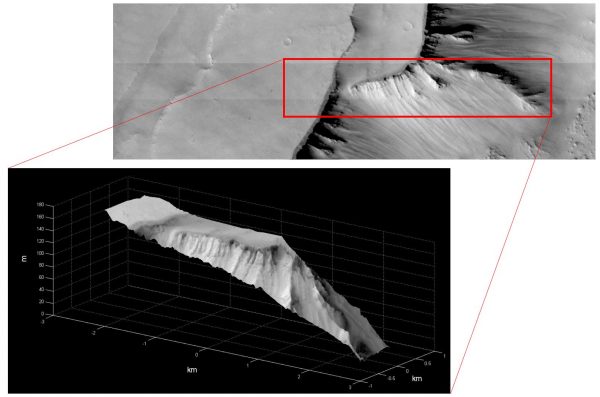
Erste Rekonstruktion eines kleinen Gebiets in der Region Noctis Labyrinthus anhand von Stereo-Bildern. Die Darstellung zeigt eine 3D-Höhenkarte des Gebiets bei einer Auflösung von weniger als 20 Metern. © ESA/Roscosmos/ExoMars/CaSSIS/UniBE
Die Farb- und Stereofähigkeiten von CaSSIS wurden ebenfalls erfolgreich getestet. «Die Techniken zur Herstellung von Stereobildern aus dieser Art von Daten werden noch entwickelt, aber unsere italienischen Kollegen vom Astronomischen Observatorium von Padova, die Experten auf diesem Gebiet sind, konnten in nur wenigen Tagen ein erstes Ergebnis erzielen», sagt Thomas. So wurde eine 3D-Rekonstruktion der Region Noctis Labyrinthus anhand von zwei Stereobildern erstellt. Diese erste Analyse zeigt eine der für die Region charakteristischen Steilhänge.
Auch der Farbtest war erfolgreich. Da jedoch die ersten Bilder von einer Region mit grossen Vulkanen stammen, deren Oberflächen mit Staub bedeckt sind und nur wenige Farbveränderungen aufweisen, kann das CaSSIS-Team noch nicht abschliessend sagen, wie die Farbqualität letztendlich sein wird. «Wir müssen noch ein wenig warten, bis wir eine buntere Region überfliegen», sagt Thomas. Bis dahin werden die Bilder schwarz-weiss sein.
In den nächsten Monaten wird das Team die Vorbereitungen für die Hauptmission starten. «Obwohl der Test sehr erfolgreich war, haben wir ein paar Dinge identifiziert, die in der Onboard-Software und in der Bodennachbearbeitung verbessert werden müssen», sagt Thomas.
Um seine endgültige Umlaufbahn zu erreichen, wird der TGO im März 2017 damit beginnen, die Marsatmosphäre zum Abbremsen zu nutzen. Nach etwa neun bis zwölf Monaten wird die Sonde dann in einen kreisförmigen Orbit 400 km über der Marsoberfläche eingeschwenkt sein. Die wissenschaftliche Hauptphase beginnt Ende 2017. CaSSIS wird dann mit dem «normalen Betrieb» beginnen und 12-20 hochauflösende Stereo- und Farbbilder von ausgewählten Zielen pro Tag liefern.
Hochpräzise Aufnahmen innerhalb von Millisekunden
Die von CaSSIS verwendete bildgebende Technik wird als «Push-Frame» bezeichnet. Hierbei werden kurze Belichtungen (Framelets) mit einer sehr schnellen Rate aufgenommen, und diese Bilder werden dann auf dem Boden zusammengesetzt, um das Endprodukt herzustellen. Für die Mars-Region Hebes Chasma wurden die einzelnen Bilder mit einer Belichtungszeit von 700 Mikrosekunden bei einer Rate von einem Framelet alle 150 Millisekunden aufgenommen. Die hochauflösende Kamera unterstützt die drei anderen Instrumente auf dem TGO und ergänzt deren sowie bisher vorhandene Daten zur Mars-Oberfläche.
Dynamische Mars-Oberfläche
Es ist jetzt bekannt, dass Mars dynamischer ist als bisher angenommen. Von besonderem Interesse für das 25-köpfige Wissenschaftsteam aus 9 Ländern (inkl. USA und Russland) ist die Möglichkeit, dass CaSSIS die Veränderungen untersucht, die über den Tag und über die Marsjahreszeiten stattfinden. Weitere Untersuchungen von möglicherweise flüssigem Wasser an der Oberfläche werden eines der Hauptziele sein. CaSSIS wird auch die anderen Instrumente auf TGO unterstützen, indem die Kamera Quellen von Spurengasen wie Methan identifizieren soll.
Das Projekt ist eine Kooperation zwischen der Universität Bern, dem Astronomischen Observatorium Padua und dem Weltraumforschungszentrum in Warschau mit Unterstützung lokaler Industrien. Gefördert wird das Projekt durch das Schweizerische Raumfahrtbüro (SSO), die Italienische Raumfahrtagentur (ASI) und die Polnische Weltraumorganisation (POLSA).
Die Struktur, der Bordrechner und der Rotationsmechanismus wurden von der Universität Bern gebaut. Das Teleskop wurde in Zürich von der RUAG Space AG gebaut. Die Detektor- und Ausleseelektronik wurde von SELEX-ES in Campi Bisenzio, Italien, entwickelt. Der Stromrichter wurde vom Weltraumforschungszentrum in Warschau geliefert. Die Flugsoftware wurde von der SGF AG in Budapest, Ungarn entwickelt.
Medienmitteilung der Universität Bern, 29.11.2016
CaSSIS Website
ExoMars Website der ESA